全部
▼
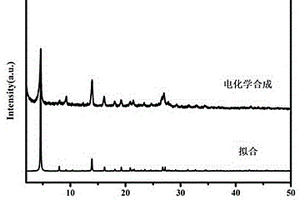
本发明公开了采用电化学法合成一种二维双金属有机骨架(2D‑Ni/CoCAT‑1)及其在电催化析氧中的应用。以泡沫镍为阴、阳极,将一定比例的钴盐、2,3,6,7,10,11‑六羟基三亚苯基苯和四丁基溴化铵溶解在去离子水中,通电反应一定时间后,溶液中产生大量的深蓝色2D‑Ni/CoCAT‑1,将反应产物离心、洗涤、干燥后与一定量的乙炔黑和萘酚超声混合滴涂到碳布上制成电极,将该电极用于电催化析氧的研究。与传统有机骨架材料的电化学合成方法相比,本方法无需有机溶剂辅助控制去质子化程度及反应速率、无需额外热能提供并进一步缩短了反应时间。本发明制备的2D‑Ni/CoCAT‑1具有优异的导电性有利于其在电催化中的应用,利用其制备的碳布电极在电催化析氧LSV测试中的过电势可低至344mV,实现了高效率电催化析氧。
 945
945
 0
0
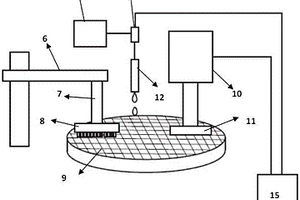
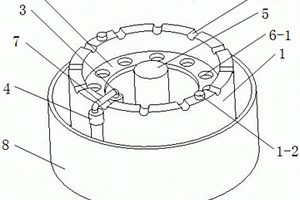
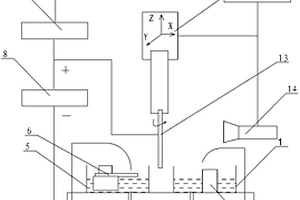
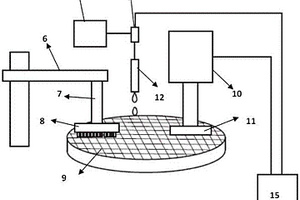
本发明涉及一种化学机械抛光垫的修整设备的结构及其制造方法。这套设备包括带螺纹通孔的修整盘底座、带不同直径或密度磨粒的基柱、水平测定盘、连杆和悬臂。修整盘表面由四个研磨单元构成,每个研磨单元又由多个基柱构成,每个基柱上面有磨粒。带磨粒的基柱可以旋入底座的通孔,并可调节露出磨料最高点的高低程度。磨粒由电化学方法固定在基柱表面。整个修整盘的磨粒高度可由一个水平测定盘测定后,才可应用到抛光垫的修整操作。此修整盘可以通过不同的基柱的组合,调节盘中磨粒的密度、磨粒的直径的分布,控制修整盘对抛光垫的抛光速率与磨损程度,可以有效地修整抛光垫。
 1254
0
1254
0
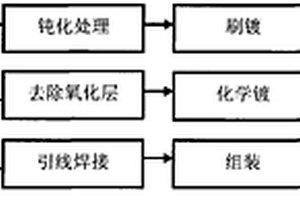
本发明提供的是一种电化学溴气传感器的制备方法。传感器采用原电池原理,铂网经过钝化处理、刷镀等工艺制成正极,银箔经过去除氧化层、化学镀等工艺制成负极,进行电解液配制,组装成电化学溴气传感器。本发明方法的有益效果是,解决了传统溴气传感器测量范围窄、分辨率低、使用寿命短、温湿补偿等问题。具有不需外加电压、稳定性好、选择性优越、不受温湿度变化的影响、结构简单、体积小等特点。
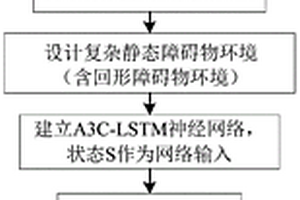
本发明属于移动机器人导航技术领域,具体涉及一种静态环境下基于深度强化学习的移动机器人避碰规划方法。本发明使用激光测距仪采集原始数据,将处理后的数据作为A3C算法的状态S,通过构建A3C‑LSTM神经网络,将状态S作为网络输入,通过A3C算法,神经网络输出相应参数,利用参数通过正态分布选择移动机器人每一步执行的动作。本发明无需对环境进行建模,通过深度强化学习算法最终实现移动机器人成功在复杂静态障碍物环境下避障。本发明设计具有转艏约束的连续动作空间模型,且采用多线程异步学习,与一般深度强化学习方法相比,大大提高学习训练时间,减少样本相关性,保障探索空间的高利用性与探索策略的多样性,提升算法收敛性、稳定性以及避障成功率。
 1046
0
1046
0
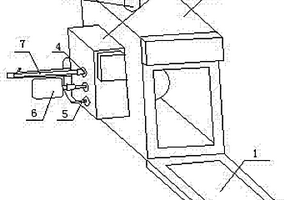
用于有机化学的微波装置。现有技术中,虽然利用了微波炉作为有机合成的热源,但微波对人体有害。一种用于有机化学的微波装置,其组成包括:门上带有观察窗(1)的微波装置(2),所述的微波装置上部连接具有壳体的调控装置(3),所述的微波装置与所述的壳体开有一组通孔(4),通过所述的通孔连接测温器(5)、电动搅拌器(6)和反应仪(7),所述的微波装置一侧开有侧通孔(8),通过所述的侧通孔装有烧瓶夹(9),所述的烧瓶夹装夹烧瓶。本实用新型用于有机化学实验。
 750
0
750
0
一种快速、非接触检测无纬布的方法,它涉及一种对无纬布的质量指标进行检测的方法。针对化学方法测定无纬布质量,存在费时、费力、消耗大量试剂的问题。本发明是这样完成的:收集近红外无纬布样品建立样品库;挑选代表性样品;建立模型;检验模型;扫描待测无纬布,判断挥发性含量是否合格;合格的绿灯亮;不合格的红灯亮,调整浸胶速度和稀释剂用量;再进行分析判断;判断树脂含量是否合格;合格的绿灯亮;不合格的红灯亮,调整胶液浓度和刮胶辊间距,再进行分析判断;判断单位面积的纤维重量是否合格;合格的绿灯亮;不合格,红灯亮为废品;三个绿灯都亮为合格品。本发明具有检测准确、速度快,可满足连续生产需要的优点。
 1174
0
1174
0
本发明公开了一种管形光谱电化学传感器,它涉及光谱电化学技术领域,它是将工作电极设计成圆轴形状;对电极设计成孔形状,池套中通过工作电极的孔径与对电极的孔径之差为400微米,间隙为200微米,溶液在池内的通道是薄层的管状空腔结构,平行光线从管状空腔内通过;本发明的工作电极和对电极的距离很小,有利于实现被测溶液的整体电解;电解池的体积小,大面积对电极降低电流密度,可防止电极极化,有利于实现被测溶液的整体电解。限位石英窗对工作电极进行限位,也可以通过紫外线和可见光。
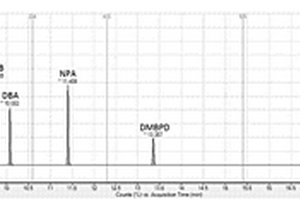
本发明公开了一种利用气相色谱‑串联三重四级杆质谱检测污水或污泥中取代苯胺类物质的方法,涉及有害化学品检测技术领域,该方法包括以下步骤:(1)制作标准曲线;(2)样品预处理:对污水样品或污泥样品进行萃取得到萃取样品,萃取样品净化后得到分析样品;(3)使用气相色谱‑串联三重四级杆质谱(GC‑MS/MS)对步骤(2)所得分析样品进行检测分析,计算得到各种取代苯胺类物质在污水样品或污泥样品中的浓度。本发明提供的方法检测限低,操作简单,并且能够同时准确测定样品中多种取代苯胺类物质的含量,并且解决了污水或污泥样品中化学物质检测的杂质干扰问题。
一种基于意图推理与深度强化学习的移动目标搜索跟踪方法及系统,涉及移动目标搜索跟踪技术领域,用以解决现有技术对复杂环境中运动的移动目标跟踪效果差、目标丢失之后搜索效率低的问题。本发明的技术要点包括:建立移动目标运动意图推理模型,根据观测到的移动目标运动状态推理目标的运动意图;基于推理的移动目标运动意图预测移动目标在丢失之后可能出现的位置;采用深度强化学习方法训练移动目标丢失之后的搜索策略;使用训练好的搜索策略对丢失的目标进行快速搜索,从而实现对目标的长期跟踪。本发明在移动目标运动模型未知时可以准确地预测出目标的运动轨迹,训练的搜索策略具有更好的泛化能力与鲁棒性,从而可快速搜索到丢失的目标。
 754
0
754
0
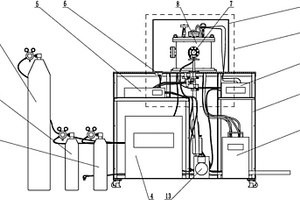
微刀具金刚石涂层的化学气相沉积装置及方法,属于金刚石薄膜化学气相沉积制备技术领域。真空泵通过真空针阀与真空反应室连通,氢气瓶、氩气瓶和甲烷瓶与混合箱连通,进气针阀固定在真空反应室炉盖上,压力控制装置与真空反应室连通,电极组件固定在真空反应室内,工作台设置在真空反应室内,微刀具固定在工作台上,两根电缆线从加热电源处引出并与电极组件连接,热电偶的探头端部贴有硬质合金薄片,红外测温仪通过其自带的支架设置于真空反应室外部,冷水机外接有四根冷水管,其中两根与真空反应室的炉盖连通,其余两根与真空反应室的炉体连通,真空表安装在真空反应室的炉盖上。本发明用于微刀具金刚石涂层的化学气相沉积。
 989
0
989
0
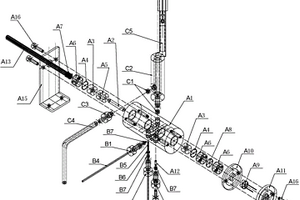
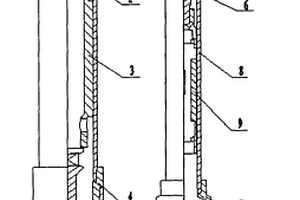
本发明涉及油田水驱、聚合物驱和三元复合驱采油技术领域,尤其是一种化学复合驱串联软柱塞防垢抽油泵。本发明提供了一种能够有效防止卡泵现象发生的装置,本发明由油管接头1、上泵筒2、上软柱塞体3、封套接头4、进油阀5、连杆6、变扣短接7、下泵筒8、下软柱塞体9、进油阀10及油管接头11部件组成;其中下泵筒8通过变扣短接7与进油阀5螺纹连接,下软柱塞体9与下泵筒8配合连接,该装置主要应用于化学复合驱机械采油。本发明具有最大限度延长检泵周期,提高泵效,有效防止卡泵现象发生,降低生产成本等优点。
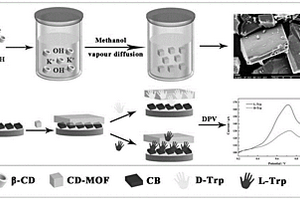
本发明公开了一种基于环糊精基MOF手性传感器及其制备方法和对色氨酸对映体的电化学识别,属于电化学传感技术领域。本发明解决了现有基于环糊精的电化学传感器的灵敏度较低、峰值电流较弱、目标手性分子间的电流差较小等问题。本发明基于β‑环糊精和K+合成了CD‑MOF,利用其高孔隙率和手性选择中心对色氨酸对映体实现了手性识别,同时将炭黑纳米粒子与CD‑MOF分层组装在玻碳电极表面,综合了炭黑(CB)的高电导率能力,构筑出高效的手性识别电极GCE/CB/CD‑MOF。该体系识别色氨酸对映体的差分脉冲伏安法氧化峰值电流差可达36μA。同时该电极还可准确预测D‑色氨酸和L‑色氨酸在其外消旋体中所占的比例。
 859
0
859
0
光催化化学反应装置,本实用新型属于光催化反应领域,它为了解决现有光催化化学反应装置的结构复杂,在同一反应条件下难以进行不同催化剂催化性能评价的问题。该光催化化学反应装置包括主反应器、顶盖、石英反应管、储气管和光源,在圆筒形主反应器的中心线上设置有光源,固定板设置在主反应器的中部,在固定板上开有多个圆孔,圆孔中插有石英反应管,通过连接管将石英反应管与储气管相连,连接管置于主反应器器壁上的管孔中。应用该光催化化学反应装置能够实现在同一反应体系下不同光催化剂的催化活性的评测与对比,能为光催化剂的优化条件选择或者其内在催化规律的研究提供科学依据,实验效率高。
 931
0
931
0
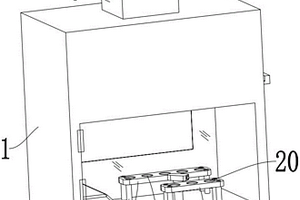
本实用新型公开了一种有机化学实验装置,包括实验箱体、工具放置台、通风净化装置、实验放置装置、摄像观察装置、试管放置装置、抽拉过滤板和观察窗,所述工具放置台设于实验箱体内,所述通风净化装置设于实验箱体内,所述实验放置装置设于实验箱体内,所述摄像观察装置设于实验箱体内,所述试管放置装置设于实验箱体内,所述抽拉过滤板抽拉设于实验箱体上,所述观察窗铰接设于实验箱体上。本实用新型属于有机化学技术领域,具体是一种有机化学实验装置,有效的解决了目前市场上对有机化学进行实验时飞起容易产生污染的问题,实现了对实验过程实时监测与记录的技术效果,是一种非常实用的有机化学实验装置。
 1133
0
1133
0
本发明涉及一种凝胶与化学剂交替注入驱油数值模拟研究方法,包括步骤1、建立地质模型;步骤2、水驱阶段历史拟合;步骤3、模拟区块确定;步骤4、数值模拟预测方案设计。本发明通过数值模拟方法,拟合试验区块凝胶与化学剂交替注入驱替过程,结合实际地质数据,利用Petrel软件建立试验区块的精细地质模型;通过静态参数差值计算得到了模型所需要的初始含水饱和度、初始地层压力和顶深等数据;利用Eclipse软件对实际生产数据进行历史拟合,更好的校正地质模型和一些流体参数,并且达到了全区拟合精度90%以上,单井拟合精度85%以上的效果;利用CMG软件进行聚驱后凝胶与化学剂交替注入驱油的数值模拟,以解决试验区块含水率上升速度快、原油采收率低等问题。
 894
0
894
0
一种微细电极的电火花电化学复合加工方法,它涉及一种电火花电化学复合加工方法,属于特种加工领域。本发明为了解决现有的块电极电火花磨削方法存在加工锥度误差、电极表面质量差,以及刃口电极微细电解磨削方法加工效率低的问题。本发明步骤一:机床初始化,对工具及电极进行装夹;步骤二:对电极(13)的块电极进行电火花磨削加工;步骤三:对电极(13)进行电解磨削精加工;步骤四:对电解磨削精加工后的电极(13)进行检验。本发明尤其适用于微细圆柱电极的加工。
 854
0
854
0
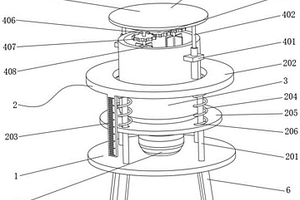
本实用新型提供了一种化学机械抛光垫的修整设备的结构。它包括带螺纹通孔的修整盘底座、带不同直径或密度磨粒的基柱、水平测定盘、连杆和悬臂。修整盘表面由四个研磨单元构成,每个研磨单元又由多个基柱构成,每个基柱上面有磨粒。带磨粒的基柱可以旋入底座的通孔,并可调节露出磨料最高点的高低程度。磨粒由电化学方法固定在基柱表面。整个修整盘的磨粒高度可由一个水平测定盘测定后,才可应用到抛光垫的修整操作。此修整盘可以通过不同的基柱的组合,调节盘中磨粒的密度、磨粒的直径的分布,控制修整盘对抛光垫的抛光速率与磨损程度,可以有效地修整抛光垫。
 1121
0
1121
0
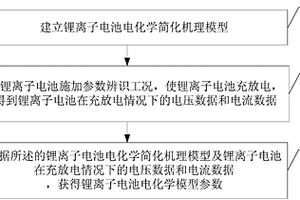
一种锂离子电池电化学模型参数获取方法,涉及新能源研究领域。本发明是为了解决现有的需要借助电化学测量方法或智能算法获取机理模型参数,不具备快速、无损获取参数的能力的问题。步骤一、建立锂离子电池电化学简化机理模型;步骤二、对锂离子电池施加参数辨识工况,使锂离子电池充放电,得到锂离子电池在充放电情况下的电压数据和电流数据;步骤三、根据所述的锂离子电池电化学简化机理模型及锂离子电池在充放电情况下的电压数据和电流数据,获得锂离子电池电化学模型参数。它用于获取锂离子电池电化学模型参数。
 755
0
755
0
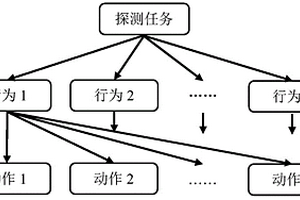
一种基于强化学习的AUV行为规划及动作控制方法,属于水下机器人技术领域。为了解决AUV规划复杂任务时过于依靠人工经验,以及基于智能算法设计的控制方法需要精确的环境模型,从而导致训练经验局限,在现实环境中应用困难的问题。本发明将AUV探测隧洞定义为总任务;完成任务对应的行为包括:趋向目标、墙壁跟踪和避障;将机器人在水下需要完成所规划的行为而产生的控制指令定义为动作;AUV在执行隧洞探测任务时,使用深度强化学习DQN算法进行实时行为规划,构建对应的深度学习的行为网络,完成隧洞探测任务的规划。通过DDPG方法训练AUV的动作网络,将AUV视为环境模型,得到力到状态的映射,从而实现AUV的动作控制。
 881
0
881
0
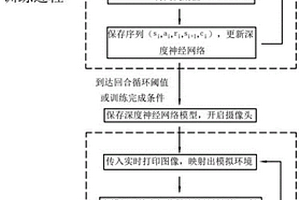
本发明涉及智能制造技术领域,更具体的说是一种基于深度强化学习的电路自动3D打印方法,该方法包括以下步骤:S1:将3D打印机喷头作为Agent在建立的模拟环境中训练更新深度神经网络;Agent是指智能体;S2:循环执行Agent的强化学习过程,并训练深度神经网络,循环完成后保存神经网络模型,开启摄像头,跳转至下一步;S3:摄像头传递打印实时环境图像信息,进行图像处理映射出模拟环境,Agent加载训练好的深度神经网络模型,根据实时探测的状态实施打印。先完成对3D打印机训练构建强化学习模型更新深度神经网络的过程,再具体到不同实际情况进行自动化打印,可以解决3D打印装备利用深度强化学习实现电路的自动化打印过程。

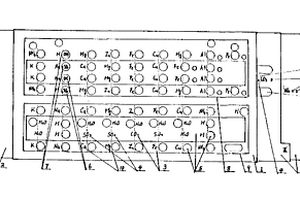
一种开放式、阵列化、集成化的电化学气体传感器及其制造方法,涉及一种电化学气体传感器,为了解决电化学气体传感器的灵敏度低、选择性差、难以形成阵列化和集成化的问题。本发明的传感器包括上电极层、电解池层、下电极层和引出层,依次对位叠层,上电极层的催化电极半封闭式覆盖第一电解池通孔,电解池层的基片上设有第二电解池通孔;第一电解池通孔和第二电解池通孔相通,形成电解池腔,下电极层的基片上设有对电极;对电极位于电解池腔正下方,引出层的基片上设有多个引出端。本发明的传感器适用于同时探测多种目标气体浓度。
 956
0
956
0
本发明提供一种钢混结构腐蚀电化学特征的分数微分识别算法,首先,建立钢混结构钢筋腐蚀过程的通用电化学等效电路,进而得到该等效电路的传递函数;其次,根据分数微分算子,对传递函数进行分数微分运算;第三,在给定待识别参数的初值后,结合电流响应的试验值进行迭代运算,当计算结果与试验结果的误差小于控制误差后,即可得到待识别参数值,从而实现钢混结构钢筋腐蚀电化学特征的识别。本专利的算法,能够在时域内实现钢混体系腐蚀的整体、快速、精确识别,这一算法能够非常方便地嵌入到腐蚀监测与控制用硬件系统中,本算法应用于石油、化工、核工业等基础结构的健康状态监测与评估。
 1103
0
1103
0
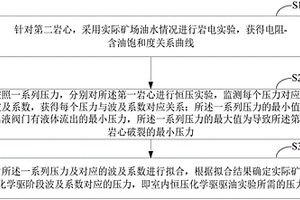
本发明涉及一种室内恒压化学驱驱油实验的压力确定设备及方法。本发明的设备包括:采用相同参数制备的第一岩心和第二岩心;按照指定井网模式设置在第一岩心上的进液阀门和出液阀门;按照第一排布方式插入第一岩心的第一电极;与第一电极连接的第一电阻测试仪;与出液阀门连接的第一液体计量器;按照第二排布方式插入第二岩心的第二电极;与第二电极连接的第二电阻测试仪;与第二岩心的出液连接孔连接的第二液体计量器;可控恒压供液装置,与第一岩心上的进液阀门的进液连接孔连接;可控恒速供液装置,与第二岩心的进液连接孔连接。通过使用等波及系数的方法确定室内试验可模拟旷场试验的恒压注入压力,可有效模拟实际矿场试验,指导矿场试验。
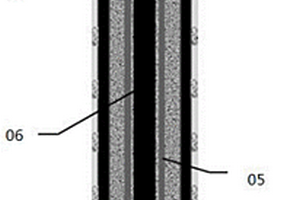
本发明涉及一种用于浅层地下水氯代烃污染原位修复的套筒式生物电化学反应器,具体涉及一种用于受卤代烃污染的浅层地下水原位修复的生物电化学反应器。本发明利用生物电化学脱卤技术,通过生物阴极为脱卤呼吸菌提供电子,促进生物脱卤呼吸的完成,解决地下水中外源电子供体不足的难题。本发明反应器的阴极包括表面均匀布孔的不锈钢圆筒和碳毡;底筒上段为直筒结构,下段为锥筒结构,底筒的上段边缘与不锈钢圆筒连接,止回球位于底筒的下段内;阳极位于不锈钢圆筒内,且PVC管位于阳极和阴极之间,阳极和阴极通过外接直流电源实现电连接。该装置可以置于口径较小的原位监测井中,操作简便,适合地下水环境复杂和操作条件不便的特点。
 793
0
793
0
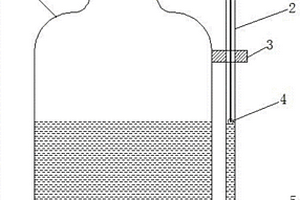
本实用新型公开一种能指示液位的避光盛放化学试剂的试剂瓶,所述的试剂瓶内设置锥形斗,锥形斗与液位检验管连通,所述的液位检验管通过固定片安装在试剂瓶的外侧,所述的液位指示杆安装在液位检验管内,液位指示杆的底部固定安装漂浮球,液位指示杆的顶部固定安装平衡环,所述的试剂瓶顶部安装瓶塞。本实用新型采用液位检验管内安装液位指示杆的设计,通过液位指示杆的漂浮位置,来准确判断试剂瓶内试剂的液位,从而确定试剂瓶内的试剂的数量,其设计科学合理,结构简单,使用方便。
 1248
0
1248
0
本实用新型公开了一种化学固液反应装置,包括化学支架、称重组件、反应罐和闭合搅拌组件,所述化学支架的顶端外壁上固定有称重组件,所述化学支架的顶端外壁上安装有反应罐,所述反应罐的一侧内壁上固定有闭合搅拌组件;所述称重组件包括支撑杆、导向环、刻度尺、弹簧、盛放环和升降孔,所述化学支架的顶端外壁上安装有导向环;该实用新型采用了称重装置,可以在固液反应后,可以对产生的气体进行计重,这样在计算化学物质时,可以直接进行观测,提高了称重效果;还采用了闭合搅拌装置,可以对反应结构进行闭合,并且对反应原料进行搅拌,无需人工搅拌,还可以避免原料进行溅出,不仅提高了搅拌效果,还降低了原料的浪费。
 1089
0
1089
0
一种基于强化学习的行星软着陆控制方法及系统和存储介质,涉及软着陆轨迹优化与控制领域,为了解决现有的行星软着陆控制存在无法保证制导律最优、模型较复杂,训练难以收敛等问题。本发明包括:一:基于着陆器的硬件构型和发动机动力配置等特征,建立着陆器动力下降段六自由度动力学模型;二:设计训练交互环境的奖励函数、观测空间、动作空间和神经网络结构;三:数值仿真环境的搭建,利用强化学习算法训练得到软着陆控制器;四:通过速度跟踪测试和软着陆测试对训练控制效果评估。通过执行步骤一和步骤二获得软着陆强化学习环境模型,智能体与环境模型交互,从而获得训练数据。通过步骤三训练可以得到软着陆控制器,最后通过步骤四挑选出表现最佳的训练结果,作为最优软着陆控制器。本发明用于软着陆轨迹优化与控制。
 1206
0
1206
0
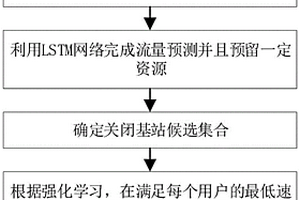
本发明提出一种基于强化学习的基站休眠方法、设备和介质。所述方法包括:建立深度强化学习模型,对超密集网络中的各个基站的未来流量负载进行预测,确定超密集网络中各个基站的关闭情况。该方法通过引入LSTM模型,通过历史数据来预测网络中各个基站未来的流量负载情况;然后根据预测出的流量负载情况,在保证用户服务质量的情况下,利用强化学习的方法选取合适的基站进行休眠,从而降低网络能耗。
 867
0
867
0
本发明公开了油井高水淹层化学封堵技术领域的一种超短半径水平井造斜段高水淹层化学封堵方法,包括步骤S1、利用修井机、钻杆将导斜器下入井筒内设计深度;步骤S2、下入开窗铣锥、G105钻杆至导斜器深度,使用动力水驱动G105钻杆、开窗铣锥进行套管开窗,对套管窗口的抛光打磨;步骤S3、随钻测量钻造斜段井眼,步骤S4、高淹水层化学封堵;步骤S5、侯凝后打开油套管闸门起出封堵管柱,重复步骤S3工序后,对造斜段高水淹层封堵效果进行试压15MPa以上,化学封堵成功。通过对高水淹层进行化学封堵,使得在造斜钻进阶段,将高水淹油层钻开时,不会导致非水淹油层因受压而不出油,进而能够对剩余油进行精准靶向挖潜。
北方有色为您提供最新的黑龙江有色金属理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!











































































