全部
▼

 1095
1095
 0
0
本发明提出了一种基于强化学习的锚泊辅助动力定位系统控制方法,包括:首先构建最优点选择问题的马尔科夫决策模型,构建状态空间与行为空间;采用神经网络构建强化学习模型Q函数,控制系统基于实时测量的锚泊辅助动力定位系统当前状态,采用ε贪心算法选择行为,观察在选择行为a后的系统状态s’与反馈奖励;将每一时间步的状态、行为、获得的奖励以及新的状态作为标签数据存入记忆库,并训练神经网络;通过不断重复上述过程,锚泊辅助动力定位系统能够获得使奖励函数最大的行为选择策略,得到定位点控制模式下能使推机器功率消耗最低的最佳定位点。
 780
0
780
0
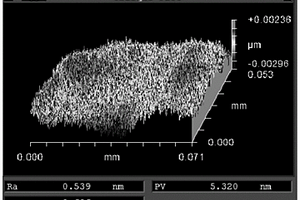
本发明提供了一种镍合金的绿色环保化学机械抛光方法,属于超精密加工技术领域。先对镍合金进行研磨,然后进行粗抛光和精抛光。粗抛光时,抛光磨粒为α‑氧化铝,平均粒径为3‑5μm,抛光液为去离子水,抛光垫为聚氨酯。精抛光时,陶瓷磨粒为氧化硅、α‑氧化铝、氧化铈、氧化镁,平均粒径为20‑60nm,重量百分比为0.5%‑3%;络合剂为亚氨基二琥珀酸钠盐、柠檬酸钠,重量百分比为0.5‑2%;pH调节剂为酒石酸、醋酸,重量百分比为0.5‑2%,调节抛光液pH为3‑5;抛光垫为磨砂革。抛光后镍合金的测量范围为50×70μm2,表面粗糙度Ra达到0.4‑0.7nm,实现了镍的超光滑超低损伤化学机械抛光。
 909
0
909
0
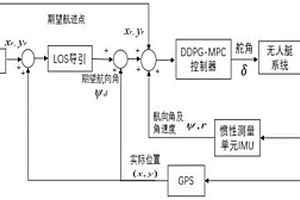
本发明属于水面无人艇轨迹跟踪控制技术领域,具体涉及一种基于强化学习MPC的无人艇轨迹跟踪控制方法。本发明在无人艇的MPC轨迹跟踪控制器设计过程中,选用无人艇的运动学模型和操纵响应模型作为预测模型,根据无人艇轨迹跟踪任务需求构造控制性能指标函数,在MPC滚动优化过程中利用强化学习的DDPG算法构建性能指标函数的求解器,通过最小化性能指标函数求解出轨迹跟踪的最优控制序列,最终将每时刻控制序列的第一个控制量作用于无人艇系统上。本发明提高了轨迹跟踪控制的鲁棒性和抗干扰,同时具备自学习能力,适应于复杂的海况环境,相较于传统的MPC控制算法其自主性和实时性更强,跟踪误差更小。
 963
0
963
0
本申请提出一种正极材料、电化学装置和电子装置,其中正极材料中含有Al元素或Zr元素中的至少一种;正极材料颗粒满足0.01≤(Dv99a‑Dv99b)/Dv99b≤0.5;Dv99a和Dv99b分别为超声波处理前和超声波处理后测得的正极材料颗粒的Dv99的值。本申请提出的正极材料能够改善正极材料的加工性能和电化学装置的循环性能。
 870
0
870
0
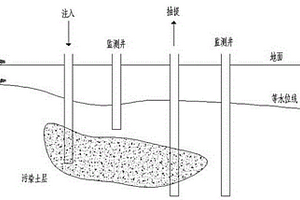
本发明涉及一种苯系物污染土壤的原位化学氧化修复方法,包括土壤修复剂的注入、抽提后异位处置及定期监测,注入的土壤修复剂在地下水径流、渗透及水力梯度的作用下,与污染土层中吸附在土壤颗粒上的污染物充分接触后,利用土壤修复剂的较高氧化还原电位,将其降解成低分子的简单的有机物类,实现对苯系物污染土壤的原位化学氧化修复方法。
 767
0
767
0
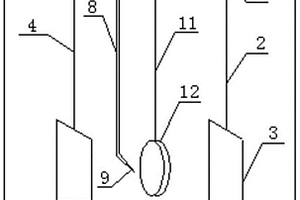
一种化学驱多介质中心通道型配注器,上接头一端连接油管,另端连接外套筒一端;外套筒另端连接下接头主体外螺纹端,下接头主体一端内螺纹连接下接头插入密封短节一端;下接头主体另端外螺纹连接下接头变扣一端,下接头主体另端内螺纹连接下接头双公短节一端;下接头变扣另端连接油管;下接头双公短节另端连接油管;外套筒内由靠近上接头端向另端依次设相互连接的调节套和节流内套管;节流波纹管套设在节流内套管外壁,节流外套管套设在外套筒内,节流外套管外壁与外套筒内壁紧贴;节流内套管背离上接头端螺接波纹管锁紧接头;可实现单层注入量、压力、温度在线测试和单层流量在线调整,满足化学驱注入井多介质多层段注入的需求。
 1028
0
1028
0
本发明方法提供一种增强现实环境下多智能体对抗仿真环境实现方法,利用深度强化学习网络结合课程学习预测各个智能体行为并作出决策,再将训练完成的强化学习智能体模型迁移至增强现实环境中,能够解决增强现实对抗仿真环境中虚拟多智能体协作策略单一造成的人机交互体验不佳的问题,具有使真实用户和虚拟多智能体之间协作对抗策略灵活多变的效果。
 1127
0
1127
0
本发明公开了一种检测苯硫酚的近红外荧光探针及其合成方法和应用,属于化学分析检测技术领域。本发明探针由8‑(2,4‑二硝基苯氧基)久洛尼定‑9‑甲醛与4‑吡啶乙腈反应得到,具有如下结构:
 1246
0
1246
0
本发明公开了一种软岩风化物作为高速铁路路基填料的化学改良方法,其包括:(1)选择破碎率大于40%、崩解率小于30%的软岩风化物;(2)将所述软岩风化物制成最大粒径小于40mm、粒径为20mm~40mm的颗粒含量小于20%、粒径小于10mm的颗粒含量大于60%的填料;(3)加入掺入剂以形成改良土;(4)对所述改良土进行拌和,直至拌和均匀;(5)对所述改良土进行7天饱和无侧限抗压强度测试,若所述改良土的7天饱和无侧限抗压强度大于300kpa,则作为高速铁路路基填料。采用该化学改良方法对软岩风化物进行改良后,可以达到高速铁路路基填料的标准,进而可以极大减少工程费用,同时减少弃碴,保护环境,最终取得良好的经济、技术、环境与社会效益。
 1015
0
1015
0
本发明涉及OGS玻璃加工技术,尤其涉及一种增强OGS玻璃孔强度的化学强化方法,特别适用于电容式触摸屏手机用OGS玻璃。本方法采取贴合保护膜→多片水溶胶粘接→孔蚀刻保持→清洗→热水浸泡→分片→去除保护膜等一系列技术方案,即用玻璃蚀刻液对玻璃孔的位置进行化学蚀刻,从而消除孔位置的微观裂痕,以达到提高OGS玻璃孔的强度的目的。采用该方法提高孔的位置强度后,可明显提高OGS玻璃的落球测试数据:落球高度值比未经该方法处理的OGS玻璃可提高两倍左右;滚筒试验次数从50次可以提高到300次,明显改善产品的强度值,使消费者在使用手机时的安全性得到很大的提高。
 1139
0
1139
0
本发明公开一种恒温层流式化学除油设备,包括除油室,设进料口,热水进口,出水口;若干水泵,其第一进水口连通到所述除油室内;若干加热器,其第二出水口连通到所述除油室内;若干三通电磁阀,其进口连通所述水泵的第一出水口,其第一出口连接所述加热器的第二进水口,其第二出口连接到所述除油室内,所述第一出口和所述第二出口不同时导通;温度感应传输装置,设置在所述除油室内,用于即时测定所述除油室内液体温度数据;控制器,控制连接所述三通电磁阀。采用本发明对金属件进行化学除油处理,不仅除油效率高,效果好,而且可以有效减少能耗。
 993
0
993
0
本发明涉及一种利用豆粕化学成分快速评估黄羽肉鸡有效能值的方法,测定豆粕中干物质基础粗蛋白含量CP、干物质基础粗纤维含量CF,将?CP值和CF值代入构建的数学模型,得到豆粕干物质基础表观代谢能。所述方法快速、动态、准确,饲粮配制时,可以根据豆粕的不同化学成分快速动态计算其表观代谢能值,并直接用于黄羽肉鸡的饲粮配制,比采用数据库中固定的白羽肉鸡对豆粕表观代谢能值更准确。
 1097
0
1097
0
本发明涉及一种基于硼酸基团的印迹分子聚合物及分子印迹电化学传感器。所述的印迹分子聚合物由苯硼酸类化合物0.02‑0.2mol/L、聚合物单体1.0‑2.0mol/L、聚合物交联剂0.1‑0.3mol/L、自由基引发剂0.1‑0.5mol/L、目标分子0.02‑0.2mol/L和水余量制备。将印迹分子聚合物,均匀涂在金属Pt电极上,之后将Pt电极放入干燥箱内,50℃聚合形成无色透明聚合物薄膜,自然冷却至室温后放入HCl溶液中,浸泡30‑40分钟,取出,用蒸馏水洗涤,干燥,得分子印迹电化学传感器。本发明制备过程简单,可快速简便识别出待测溶液中的葡萄糖分子,准确性率高。
 809
0
809
0
一种基于强化学习和好奇心的迷宫机器人路径规划方法,属于移动机器人技术领域。该模型以强化学习为基础,包括Q‑learning算法,好奇心算法,以及回溯强化。其中,好奇心算法包括一个BP网络,联想记忆网络和内部奖励三部分。算法首先感知所在节点以及状态;随后根据好奇心算法进行好奇心奖励计算,而后根据Q‑learning算法更新公式计算Q值;选择动作;发生状态转移;到达目的地后进行回溯强化;重复以上过程直至学习到最短路径。本发明引入基于预测误差的好奇机制,使得算法对未知环境有更好的探索能力,同时也降低了重复探索的次数,减少了学习过程中的寻路时间。使得机器人在迷宫中能更好更快地寻得最优解。
 1106
0
1106
0
本发明公开了一种基于深度强化学习的区域边界主交叉口信号控制方法,包括步骤:将路网分为关键区域与外围区域两大部分;基于Sumo搭建仿真平台,导入真实的公交出行数据,合理设置社会车流量,借助仿真获取关键区域MFD;建立关键区域与外围区域之间的交通流动态守恒方程;基于步骤S3建立的交通流动态守恒方程,结合模型预测控制MPC与遗传算法,求取最优边界控制参数;在求得最优边界控制参数的情况下,进行深度强化学习,得到最优的区域边界主交叉口信号控制方案,使得实际转移车流量与预期转移车流量之间的差距最小。本发明实现了城市路网的边界交叉口信号智能控制,动态的调节各区域间的进出比,以达到缓解交通拥堵的目的。
 1150
0
1150
0
本发明提出了一种电力系统深度强化学习紧急控制策略提取方法。通过引入电力系统节点模型多个历史时刻的特征数据构建观测数据;进一步构建深度Q学习网络模型,并采用随机梯度下降优化算法进行优化训练得到电力系统紧急控制深度强化学习模型;基于已训练完成的深度Q学习网络模型,在特定的故障场景下,生成数据集;并在此数据及上训练基于信息增益比的加权倾斜决策树模型,以完成策略提取;设定策略保真度指标、策略实际控制性能指标、模型复杂度指标,以评估不同超参数下的模型性能,从而根据实际需求选出最优模型,以用于电力系统紧急控制领域中。
 858
0
858
0
本发明提出一种用于制造耐化学腐蚀复合绝缘子的混炼胶,其由包括以下重量份的主要原料混炼而成:硅橡胶生胶100,环氧树脂E-20改性甲基硅树脂1~10,改性气相二氧化硅18~40,硅烷偶联剂1~15,活性氢氧化铝粉90~180,三乙醇胺0~1.2,其中,硅烷偶联剂是A-151硅烷偶联剂、A-171硅烷偶联剂、KH-560硅烷偶联剂其中之一或混合,硅橡胶生胶为乙烯基含量在0.04~0.35%的甲基乙烯基硅橡胶;环氧树脂E-20改性甲基硅树脂中环氧树脂占40~75%;本发明还提出了这种混炼胶的铡备方法,经测试,这种混炼胶具有良好的耐化学腐蚀性能,由其制造的复合绝缘子特别适合于盐碱地区和化工、粉尘污染区使用。
 1049
0
1049
0
本发明公开一种溶解氧电化学传感器,包括述圆柱电极体侧面依次设有环形的作为阳极的银电极和参比电极,所述金电极、银电极和参比电极分别通过第一导线、第二导线和第三导线与位于电极基座内电路板连接;所述壳体与圆柱电极体之间且位于电极基座与透氧膜之间的电解腔内填充有胶状电解液,所述壳体与电极基座之间通过内螺纹、外螺纹旋转连接,所述电解液包括以下比例重量份的组分:氯化钾37.275重量份、聚丙烯酰胺10重量份和水1000重量份。本发明溶解氧电化学传感器中电解液长时间工作pH值保持中性,提高了产品的安全性,也有利于电极消耗电解液中氧气,且响应速度快,寿命长,避免了电极电位发生变化而导致测量结果偏移的现象。
 846
0
846
0
本发明公开了一种锅炉烟气化学法脱硫脱硝剂及其制备方法,属于烟气脱硫脱销领域。本发明包括:20-90份生产乙炔的电石废渣、10-35份造纸废液、10-40份生产纯碱的废渣、0.01-0.2份分散剂、0.01-0.1份发泡润湿剂、0.01-0.5份防沉剂。本发明的锅炉烟气脱硫脱硝剂特别适用于小型燃煤、燃气以及以生物质为燃料的锅炉,本发明的脱硫脱硝剂可在较低温度(700℃以下)下进行脱硫脱硝。本发明的锅炉烟气化学法脱硫脱硝剂,脱硫脱销效率高达99%以上,测试处理后烟气中硫含量在5mg/m3以下,NOx为20mg/m3以下。
 1024
0
1024
0
本发明涉及一种提高钠离子电池锡负极材料电化学性能的方法,该方法通过改变电化学性能测试时锡负极的上限电压或下限电压,将Sn与NaSn3相互转变平台去掉;使锡负极从充放电的第二圈开始初始状态为NaSn3,降低了充放电过程中体积膨胀率,与单质Sn相比,该物质弹性模量更小也就是刚性更小,更容易适应巨大的体积膨胀,进而大幅度提升电池的循环稳定性。相比于没有去平台的电池,本发明方法得到的锡负极电池在2Ag‑1的电流密度循环2500次后依旧可以保持455mAh g‑1的质量比容量。而没有去平台的电池容量则快速衰减,在40次循环后就失去活性,相比于重新合成不同形貌的纳米级Sn,本发明的方法更简单,成本更低。
 709
0
709
0
本发明公开了一种扫描电化学显微镜,包括:三维滚珠丝杠扫描器、三维压电扫描器、导电探针、导电基底、工作平台和微控单元,所述三维滚珠丝杠扫描器包括X调节轴、Y调节轴和Z调节轴;X调节轴、Y调节轴和Z调节轴两两相互垂直设置,所述X调节轴设置在工作平台上,所述三维压电扫描器设置在Z调节轴的上,本方案的扫描电化学显微镜内部集成稳定性较高的滚珠丝杠扫描器、压电扫描器、导电探针、导电基底和微控单元,通过滚珠丝杠扫描器对压电扫描器的扫描范围和线性度进行校正,避免了使用精密距离测试仪器或标准样品,具有操作简便和成本较低的优势。
 935
0
935
0
本发明适用于化学机械抛光技术领域,提供了一种化学机械抛光方法、系统及控制设备,其中方法包括:在抛光期间对晶圆膜厚进行在线测量,以获取晶圆的第一膜厚形貌和预设时间后的第二膜厚形貌;根据所述第一膜厚形貌、所述第二膜厚形貌以及期望膜厚形貌,计算实际去除速率和期望去除速率,其中,所述实际去除速率为晶圆由所述第一膜厚形貌抛至所述第二膜厚形貌的实际膜厚去除速率,所述期望去除速率为使晶圆由所述第二膜厚形貌达到所述期望膜厚形貌所需的膜厚去除速率;将所述实际去除速率与所述期望去除速率进行比较以调整抛光参数中的压力配方,并按照调整后的压力配方进行抛光。
 746
0
746
0
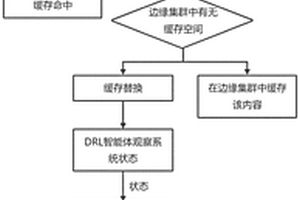
本发明公开了一种基于深度强化学习的全景视频边缘协作缓存替换方法,通过利用边缘缓存在应对VR全景视频流传输挑战方面的优势以及深度强化学习DRL适用于解决复杂问题的特性,在优化缓存效率的基础上,综合提升VR全景视频流传输的各方面性能。本发明充分考虑了多种视频编码版本、可能存在的对全景视频用户视场FoV的预测错误以及面向多用户的长期收益,对传输过程中的成本、视频内容质量不匹配水平以及响应时延进行联合优化,使得用户获得高质量、低成本的全景视频流。
 1195
0
1195
0
本发明公开了一种地球化学异常识别方法,本发明是通过C‑A分形模型的算法是先将地球化学数据进行数据网格化,然后绘制元素含量等值线图,记N(r)为等值线图元素含量为r时对应的面积,从而得到数据(N(r1),N(r2),N(r3),…,N(rn))(r1,r2,r3,…,rn),代入分形模型(1)然后利用最小二乘法即可求得相应的分维数。通过本发明的识别方法在表明庞西垌地区银金矿床具有分形特征对矿区内银矿储量进行过预测取得了满意的效果。
 1083
0
1083
0
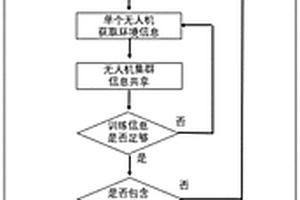
本发明公开一种基于多智能体强化学习的无人机集群高效通信方法,构建无人机飞行环境模拟器;随机选取一架无人机作为队长并标记;每架无人机获取并维护本机的局部观测值,将自身观测值进行编码并发送给队长;队长根据每架无人机的自身观测值,分别对全局观测值进行attention注意力机制处理,根据信息的重要程度来决定信息的权重,继而将计算好的观测值发送给每个队友,作为队友的全局观测值;训练阶段以全局观测值作为训练数据,直到策略网络收敛;执行阶段以分布式的方式进行;对队长的存活给一个额外的奖励。本发明可以在通信开销较小的条件下解决无人机集群集中式信息交互的问题,给予无人机自主决策权。
 1096
0
1096
0
本发明属于一种铀矿勘查方法,具体公开一种地球化学元素组合示踪勘查热液型铀矿的方法:测量勘查区土壤中的铀分量;测量210Po;制作铀分量、210Po元素平面等值线图;根据铀分量/铀总量比值判断是否为矿致铀分量异常;若为矿致铀分量异常,则进一步判断:①通过铀分量等值线图看是否有铀分量异常浓集中心;②通过210Po等值线图看是否有铀分量、210Po异常组合;③铀分量异常区是否与有利成矿断裂构造蚀变带对应复合地段;若步骤①-③的结论至少有2条为肯定,判定存在热液型铀矿。本发明通过提取、测定地表土壤样品的铀分量、210Po,可以探测出覆盖层厚度数十米至几百米的热液型铀矿。
 906
0
906
0
一种含氯废水化学需氧量(COD)初筛方法,其特征在于,包括下列步骤:(1)建立初筛体系,并建立不同COD的溶液按初筛体系反应后,COD与吸光值关系的标准曲线;(2)确定氯离子在初筛体系下的COD贡献率;(3)待测样品按初筛体系反应后,按吸光值用标准曲线计算出含氯COD;(4)测试氯离子浓度后,按氯离子的COD贡献率得到氯离子转化COD;(5)含氯COD减去氯离子转化COD,即得待测样品在初筛体系下的COD,再用初筛体系下样品的转化率校正系数校正,即得待测样品的COD范围。该方法具有快速、低消耗、便于实现自动化的优点。
 1138
0
1138
0
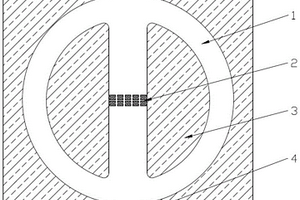
本实用新型公开了一种电化学三电极体系装置,包括固定在容器内的辅助电极、参比电极及工作电极;辅助电极由依次连接的辅助电极导线、矩形电极片及辅助电极悬挂线组成,辅助电极导线和辅助电极悬挂线固定于容器内;参比电极由相连接的铂棒及尖端组成并固定于容器内;工作电极由相连接的导线和工作面组成并固定于容器内;参比电极及工作电极置于矩形电极片围合的区域之内,工作电极的工作面浸没于容器中的测试液中;由于辅助电极采用铂片整体裁剪而成,不存在焊接;工作电极采用同一材料机械加工而成,且不存在焊接及绝缘封装问题;参比电极采用铂棒制成,所以测试过程不受测试溶液温度、压力的限制,可实现任何温度、压力溶液中的在线测试。

本发明公开了一种基于注意力机制与强化学习的多智能体游戏AI设计方法,首先,对智能体原始观测信息进行基于实体的局部信息划分并分组;其次,基于每个分组信息表征得到当前时刻的局部策略,根据动作‑观测历史信息获得对应局部信息的注意力权重,根据注意力权重对所有局部策略进行聚合得到局部信息策略;最后,将局部信息策略与原始观测信息作为策略输入输出的基准策略进行聚合得到智能体最终的策略。与现有技术相比,本发明解决了多智能体系统中智能体观测信息冗余问题,能够有效的提高智能体的学习效率。
 811
0
811
0
本发明公开了一种热对流式电化学振动传感器,包括:工作介质、设有内部中心流道及外部环形流道的密封腔、热对流驱动单元、速度测量单元及信号处理电路。其中,工作介质完全填充于密封腔的内部;热对流驱动单元位于密封腔的底部,且正对内部中心流道;速度测量单元位于密封腔的内部;信号处理电路分别与热对流驱动单元及速度测量单元连接。本发明利用设有内部中心流道及外部环形流道的密封腔密封工作介质,利用热对流驱动单元驱动工作介质形成稳定的环形流动,并利用工作介质运动速度的变化反映外界加速度的大小,从而避免了橡胶膜的使用,改善了传感器的长期稳定性,且能够测量直流加速度。
北方有色为您提供最新的有色金属化学分析技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!






































































