全部
▼

 1199
1199
 0
0
本发明公开了一种加热腔室及等离子体增强化学气相沉积装置,包括装载基片的载板,载板的下部固定有温度变形器件,载板的下方侧面对应于温度变形器件的位置设有测量光栅。温度变形器件能随载板的温度变化产生不同的变形,温度变形器件形变通过光栅的光量改变而捕捉,进而测量载板的温度。可以提高测温精度;对于温度过高的情况,可以测热电偶无法承受的区域温度。可以用于PECVD系统或其它需要在腔室内采用上下两层红外加热的系统,测量误差较小。
 981
0
981
0
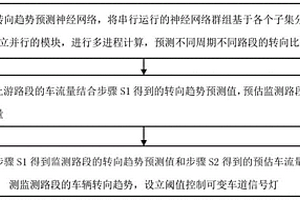
本发明提供了一种基于多进程强化学习的可变车道控制方法,构建转向趋势预测神经网络,将串行运行的神经网络群组基于各个子集分解为独立并行的模块,进行多进程计算,预测不同周期不同路段的转向比例,得到转向趋势预测值;根据上游路段的车流量结合转向趋势预测值,预估监测路段的车流量,得到预测监测路段的车辆转向趋势;根据监测路段的转向趋势预测值和预测监测路段的车辆转向趋势,设立阈值控制可变车道信号灯。本发明解决了现有技术由于无法根据路口的交通需求变化灵活的调整控制策略,灵活度低,适应性差,导致部分可变车道华而不实,无法有效解决因车道属性与出行需求所产生的矛盾的问题。

给水管网水质化学稳定性研究用的管段模拟反应器和方法,属于饮用水处理技术领域。其特征在于:以搅拌产生的横向环流来模拟实际管道中的纵向水流条件,研究水与管段内壁管垢长时间接触产生的水质变化。截取具有一定使用年限的腐蚀管段,与有机玻璃盖板连接成“管段模拟反应器”。反应器上设备有探头插口,可外接pH、溶解氧和余氯等在线监测系统和药剂自动投加设备,将试验水质参数稳定运行在一定范围。开启微电机带动搅拌桨对反应器内水体进行搅拌,试验水体与腐蚀管垢经过一段时间接触后,水中的化学离子组分与管垢发生反应,从而导致管垢金属离子释放。根据研究得到的相关技术参数,能很好地使用户出水水质达到国家标准饮用水的目标要求。
 919
0
919
0
一种高压环境下恒电位电化学气体传感器的校准方法。其中,通过测量传感器在有限个离散环境压强下的气体成分浓度-电解电流响应曲线,获取一定范围内任一固定环境压强下传感器电解电流和气体成分浓度之间的响应曲线,实现对恒电位电化学气体传感器进行高压下的校准。
 1134
0
1134
0
本发明涉及机械研磨减薄技术领域,更具体而言,涉及一种用于铌酸锂、石英、蓝宝石等晶体的化学机械研磨减薄的装置及其使用方法;提供一种晶体的化学机械研磨减薄的装置及激光反射校准法,实现对晶体的上下两个面的平行度的高精度校准,减薄后晶体超薄,厚度能达到几十甚至十几个微米,平行度误差1微米以内,校准精度高、易操作;包括:第一固定片、微分头、载物块、修盘环、胶皮垫、第二固定片、加工晶体、有孔校准玻璃和第三固定片,所述微分头通过自身的螺纹与第一固定片固定,所述有孔校准玻璃通过第三固定片与修盘环固定;本发明主要应用于光电探测器敏感层制作、声光器件压电换能器制作等超精密晶体加工相关方面。
本发明涉及一种在微生物电化学反应器阳极构建电催化细菌生物膜的方法,步骤如下:先组装微生物电化学反应器并连接电路,第一路为在阳极与阴极之间串联固定电阻,第二路为在阳极与阴极之间串联直流稳压电源、电流表、可变电阻器和循环时间继电器的工作触头;然后向阳极室注入细菌生长培养基液并接种菌源,接通第一路对微生物阳极进行预启动,测量阳极电势变化得到极化曲线,确定阳极的极限电流值;接着以脉冲极限电流刺激电催化细菌生物膜生长后,再次得到新极限电流值,然后在新极限脉冲电流下进行下一轮刺激,如此反复直至极限电流无明显增长,阳极电催化细菌生物膜即构建完成,该电催化细菌生物膜能够在较高工作电流下稳定运行。

本发明公开了一种基于化学气相沉积制备具有光电响应的二硒化铌纳米片阵列的方法,是以五氧化二铌粉末和硒粉为原料,通过一步常压化学气相沉积在氧化硅衬底上生长出高质量的二硒化铌纳米片阵列。本发明具有生长简便、大面积、高效的特点,所制备的材料具有良好的紫外‑可见光吸收性能和良好的稳定性,且光探测响应速度快。
 1186
0
1186
0
本发明公开了一种原位电化学SEM液体芯片组件、其制备方法与应用。所述芯片组件包括密封结合的基片和盖片以及储液池和至少两个电极,所述储液池至少用以容纳电解液,该至少两个电极彼此间隔设置,所述电极的至少局部分布于储液池内,所述基片或盖片上与储液池对应位置处还分布有观察窗口,所述观察窗口至少用以对储液池内的物质进行观测,所述观察窗口上密封覆盖有至少可供电子束通过的薄膜,所述芯片组件还包括与储液池连通的注液孔。本发明大幅简化了原位SEM芯片组件的构造,降低其制造成本及使用难度,且其通用性强,利于在电化学反应过程中进行原位SEM表征等。
 818
0
818
0
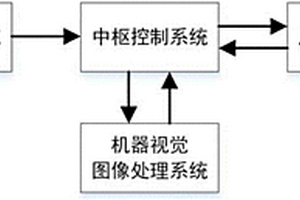
本发明提供了一种基于深度强化学习的六足机器人实时步态规划方法,步骤包括:由六足机器人获取环境路况信息并制定整体的运动轨迹;通过摄像头获取环境的照片,再根据照片利用双目测距方法计算出目标轨迹的路况信息,并将计算出的轨迹路况信息用于机器人质心运动轨迹导航;在机器人腿的足端摆动空间范围内,拍摄路况环境的照片,并通过预先训练过的基于深度确定性策略梯度(DDPG)的深度强化学习网络对照片进行数据降维和特征提取;根据特征提取结果得出六足机器人的控制策略,六足机器人根据控制策略来控制机器人的落足,实现六足机器人的实时行走。该步态规划的方法能够对路况复杂的非结构环境进行实时规划,对提高六足机器人的环境适应能力具有重要意义。

本发明提供一种光化学除去氧气来保护光敏剂的三重激发态的介质及其方法和应用,所述介质为聚乙烯吡咯烷酮。所述方法为:将PVP、光敏剂与溶剂混合,静置形成凝胶,使用激发光照射所述凝胶。所述方法能够简单有效的方法去保护磷光不被空气中的氧气猝灭,并且将其应用在光物理和光化学过程的观察和测试试验、光刻或三重态‑三重态湮灭光子上转换等方面。
 1049
0
1049
0
本发明公开了一种用于高压电缆缓冲层电化学腐蚀研究的实验装置,包括密封腔体以及安装于密封腔体上的电极组件、调压组件和气体传感器,电极组件包括上电极和下电极,上电极包括一体成型的板电极Ⅰ和棒电极Ⅰ,下电极包括一体成型的板电极Ⅱ和棒电极Ⅱ,板电极Ⅰ和板电极Ⅱ位于密封腔体内且位置相对并平行设置,板电极Ⅰ和板电极Ⅱ的相对表面上均设置有铁质圆环,电缆样本放置于上电极和下电极的两个板电极之间;调压组件包括托盘以及配套使用的调压件,托盘安装于棒电极Ⅰ的顶端端部。本发明充分考虑了实际电缆运行中缓冲层所受压力以及电流密度对其产生电化学腐蚀的影响,在消除氢气传感器的测量误差基础上可进行多因素联合腐蚀研究。
 1002
0
1002
0
一种航天器深度强化学习莱维飞行控制系统,包括:自主规划模块,根据航天器的状态信息获取特征,利用该特征进行预测,并获得莱维飞行参数;莱维飞行模块,利用莱维飞行参数,确定下一时刻的飞行轨迹;航天器姿轨控模块,用于控制飞行器跟踪下一时刻的飞行轨迹。本发明在莱维飞行的基础上,采用深度强化学习以综合考虑各种因素,选择最佳的飞行轨迹,以保证在最优的飞行性能。
 1128
0
1128
0
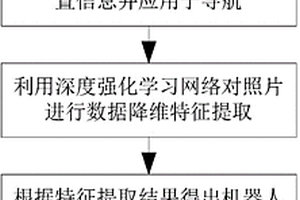
本发明提供了一种基于深度强化学习的机器人自适应抓取方法,步骤包括:在距离待抓取目标一定距离时,机器人通过前部的摄像头获取目标的照片,再根据照片利用双目测距方法计算出目标的位置信息,并将计算出的位置信息用于机器人导航;当目标进入机械手臂抓范围内时,再通过前部的摄像头拍摄目标的照片,并利用预先训练过的基于DDPG的深度强化学习网络对照片进行数据降维特征提取;根据特征提取结果得出机器人的控制策略,机器人利用控制策略来控制运动路径和机械手臂的位姿,从而实现目标的自适应抓取。该抓取方法能够对大小形状不同、位置不固定的物体实现自适应抓取,具有良好的市场应用前景。
 1021
0
1021
0
本发明公布了基于目标分层双感知域的强化学习的无人车路径规划方法,充分考虑无人车的动力学约束;通过设定子目标层级缩小地图区域的维度;通过目标分层方法使得子目标层处在安全区的中间部位;通过设置双感知域包括障碍物感知域和目标发现域减少观测输入,将障碍物感知和目标发现分开解耦;实现基于目标分层双感知域的深度强化学习的无人车路径规划。本发明方法对不同维度的地图都能够适应使用,且在训练中避免了维数灾难,计算效率高,适用性强,能够满足实时路径规划的实际需求。
 949
0
949
0
本发明公开了一种基于深度强化学习的数据仪表板生成方法,包括:(1)将仪表板生成问题刻画为马尔可夫决策问题,即将马尔可夫决策问题中的状态空间视为由图表组成的仪表板,将动作空间视为对图表的操作动作和图表参数;(2)构建包含嵌入网络、决策网络和评价网络的深度强化学习模型;(3)构建仪表板特征,利用嵌入网络提取仪表板特征的共享嵌入向量,利用决策网络根据输入的共享嵌入特征经计算预测对图表的操作动作和图表参数选择,并计算决策网络获得的即时奖励,利用评价网络根据共享嵌入向量产生图表的操作动作和图表参数的预期回报;(4)根据图表操作和图表参数进行图表绘制以更新仪表板。该方法能够快速准确地生成仪表板。
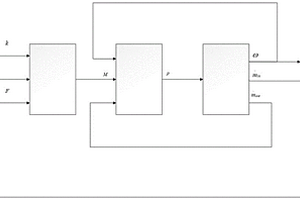
本发明涉及基于无模型强化学习的内燃机起动控制策略、控制系统及汽车,首先建立了内燃机起动系统框图,然后设计基于嵌入辅助轨迹的算法并应用,基于此设计了带有自适应控制器的内燃机起动系统结构,进一步更新设计了基于辅助轨迹的嵌入式神经网络算法并应用,最后给出了速度模块的方框图。本发明开发出一种不引入探测噪声的完全无模型算法,并且在内燃机起动系统的框架内保证了收敛性和稳定性,大大提高了系统的性能,改进了传统的无模型算法,并将其与强化学习算法结合起来,利用现代控制理论设计了一种具有最优自适应控制的系统,其更好地解决了内燃机起动问题。
 1161
0
1161
0
本发明提供了一种中空纤维萃取检测火锅底料中罂粟壳成分的方法,属于分析化学检测领域。方法包括以下步骤:(1)样品提取:称取2 g样品(精确至0.01 g)于50 mL聚四氟乙烯具塞离心管中,加入4mL水,振摇使分散均匀,加入10 mL提取剂(甲醇:乙腈=1:9),然后加入5g无水硫酸钠和1.5 g无水乙酸钠,振摇混匀后,振荡提取10 min,以9000 r/min离心7 min,取上清液氮吹至不超过1mL,加入一级水待中空纤维萃取。(2)中空纤维萃取:分别在中空纤维萃取装置中安装中空纤维膜、加入200μL三氯甲烷,设置流速为1mL/h,将待萃取溶液调节至pH值为6、盐浓度为25%,然后进行中空纤维萃取;萃取完成后,用流动相进行定容至1mL,进液相色谱‑串联质谱仪检测。本发明的有益效果是,利用中空纤维萃取技术,建立了火锅底料中罂粟壳成分的检测方法,该方法具有有机溶剂用量少、对环境友好,所建立的方法检测限、回收率、精密度均能满足检测的相关技术要求。
 900
0
900
0
本发明涉及一种化学分析测试方法,特别公开了一种油浆固含量的检测方法。该油浆固含量的检测方法,其特征在于:包括如下步骤:将油浆样品预热;向离心管中加入溶剂,再倒入预热混匀的油浆样品,然后再加入溶剂,使其混合均匀;把离心管放入离心机,使油浆中悬浮的催化剂颗粒沉积;读出离心管底部沉积的催化剂的体积毫升数;根据催化剂体积毫升数,换算出油浆的固含量。本发明油浆固含量的检测方法的有益效果:实现了离心法快速、精确测定油浆固含量的目标,进而为油浆的综合利用、催化装置安全平稳运行提供了技术支持,解决了油浆中悬浮催化剂颗粒沉积时携带沥青质、胶质,测量数据准确性差的问题。
 869
0
869
0
本发明涉及脉冲电化学加工的方法。本发明涉及钢和合金的脉冲电化学加工(ECM)领域并且可以用于实施各种精密仿形和冲孔操作以制造由难加工材料制成的机器和工具工件的复杂的轮廓表面。本方法包括:施加与加工电极和工件彼此相向移动到最短距离的时刻同步的微秒电流脉冲包,测量每个脉冲中的至少一个谐和电压值和谐和电流值,计算对应的电极间间隙的电阻值,以及根据电极间间隙的电阻的变化来调整加工过程。在加工过程期间,根据脉冲供给期间的电极间间隙的电阻的曲线形状的变化来调整幅度-时间脉冲参数,该曲线形状被认为是对加工电极的形状进行仿形的精度标准。
 947
0
947
0
本发明涉及一种小活络丸内非法添加化学药品的快速筛查方法。首先制备对照品和供试品溶液,然后分别吸取对照品溶液,供试品溶液,点于同一块硅胶薄层板上,以展开剂上行展开,取出晾干,分别置紫外光灯下观察薄层色谱,再喷上硫酸乙醇溶液,并置于烘箱中恒温加热至薄层板上的斑点显色清晰,再分别置日光及紫外光灯下观察薄层色谱,若与对照品相同比移值处有相同颜色的荧光淬灭斑点、荧光斑点或斑点同时出现,则判定样品结果为阳性。显然,本发明操作简便,快速,成本低,既解决了其中的假“阳性”干扰的问题,也避免了传统采用红外光谱、HPLC-MS等测定所产生的昂贵费用和大量时间,使有效监控小活络丸内是否非法添加化学药品成为可能。
 894
0
894
0
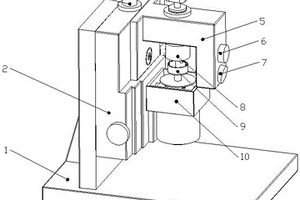
本发明公开了一种镁合金表面薄液膜电化学实验装置及其实验方法,其装置部分包括底座系统、电解池系统和测量控制系统;其采用杠杆调节装置、电解槽底板调平螺栓、千分表调节支架、蠕动泵等一系列技术手段,以获得100μm以下的不同厚度的薄液膜条件,并通过在电解池内部的形成有多孔结构的绝缘柱体内部空腔结构,可以避免长时间浸泡实验中镁合金腐蚀产生的氢气对薄液膜厚度的影响,保证薄液膜厚度均一、稳定,从而仿真性模拟人体内部微环境下,镁/镁合金腐蚀的真实情况;其具有构造简单、操作简便,可满足全面研究镁合金的腐蚀电化学行为的实验需要;其实验方法简单、实验结果真实、准确。
 1084
0
1084
0
一种氧化铝陶瓷粉末的化学镀银方法,1)将预处理过的氧化铝粉末加入到盐酸中,电磁搅拌粗化处理;2)再加入到敏化液中,电磁搅拌敏化处理;3)再加入到活化液中,电磁搅拌活化处理;4)再加入到还原液中,均匀搅拌,再加入银氨溶液,调节pH值在10.5~11.5进行化学镀银,电磁搅拌6~8h,镀覆完成后经清洗,离心,真空干燥。本发明镀层更加均匀,且有金属光泽,极大的改善了陶瓷粉末的综合性能,提高了氧化铝陶瓷与熔融Al‑Si合金间的润湿性,所得的粉末测得的接触角从136.5℃降低到了107.5℃,氧化铝增强Al‑Si基复合材料的性能也得到了显著提高。本发明制备工艺简单,制备成本低,原料利用率高。
 838
0
838
0
本发明公开了一种基于强化学习的机器人恒力曲面跟踪方法,包括步骤:(1)针对工业机器人末端执行器与曲面轮廓接触时的特征,建立曲面法向力和已知传感器坐标系的映射关系;(2)对机器人和曲面的接触过程设计显式力控制器;(3)利用基于高斯模型推测的强化学习方法对控制器的参数进行优化;(4)迭代实验直到得到力和期望的误差在设定的范围之内。本发明解决了现有机器人曲面跟踪中难以得到恒定跟踪力的问题,具有不需要先验经验,数据利用率高和收敛速度快的优点,得到的曲面轮廓轨迹为后续的打磨,抛光等加工提供初始的参考轨迹。
 1206
0
1206
0
本发明涉及一种基于空心AFM悬臂梁探针的电化学3D打印装置及方法,属于3D打印与局部电沉积技术领域。微调机构固定在底座上,USB光学显微镜安装在微调机构上,固定装置与微调机构固定连接,半透半返镜套接在喷头装置上,喷头装置、半导体激光器和位置灵敏探测器安装在固定装置上,组合式高速扫描器与微调机构固定连接,打印室固定在组合式高速扫描器上。优点是将空心AFM悬臂梁探针与电化学沉积技术相结合,开发了微纳米尺寸金属结构3D打印的新方法,使用空心AFM悬臂梁探针实现微观操纵,极大地提高了打印精度、打印速率和零件性能,可实现复杂三维结构的制造,采用组合式高速扫描器取可实现xyz方向的高速移动,提高打印精度。
 913
0
913
0
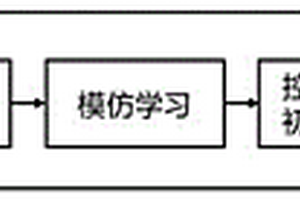
本发明公开了一种基于模仿与强化学习的医药机器人自主避障方法及系统,该方法包括:步骤1:设置医药机器人医药搬运场景;步骤2:获取专家演示二元组数据;步骤3:构建基于模仿学习和强化学习的医药机器人移动控制模型;步骤4:模型训练;步骤5:对医药机器人进行自主控制。本发明在医药机器人移动控制模型中将图注意模块引入价值网络中,使能够适应智能体和障碍物数量不确定的不同环境,同时,区分了医药机器人可观测范围内不同智能体和障碍物对移医药机器人的影响,使其能够更好地做出决策。只需一组网络参数就可以适用于处理各种情况,即网络具有较好的泛化性。

本发明公开了一种基于深度强化学习的无参考超高清视频质量客观评价方法,被测超高清视频经过抽帧和下采样处理后,得到低分辨率的帧图像序列。将该帧图像序列逐帧送入基于深度学习的空域失真特征提取网络,得到与每一帧对应的空域失真特征。将上述特征逐帧送入基于深度强化学习的超高清视频质量评价网络,该网络根据输入的每帧空域失真特征对视频质量分数进行动态调整。当图像帧序列的最后一帧输入模型后,可得到整个视频的质量评价分数。本发明利用深度学习网络全面感知并提取超高清视频的空域失真特征,对超高清视频的失真信息进行全局融合并模拟人类视觉感知过程对视频质量进行评分。本发明性能优于传统的无参考视频质量客观评价方法。
 846
0
846
0
本发明提供了一种基于强化学习的基片集成波导参数优化方法及结构,方法包括如下步骤:对待优化基片集成波导进行参数提取:参数包括阻抗网络中阻抗单元的偏转角度θ,以及加载其上的结构参数L;根据Q‑learning算法,基于强化学习中的ε贪婪策略,以参数夹角θ和尺寸L做范围变化并代入三维电磁场仿真软件进行变量仿真测试,得到参数对应的奖励值或惩罚值;根据所述参数对应的奖励值或惩罚值,得到最优参数。本发明在线下利用深度学习算法学习到最优的基片集成波导优化参数,然后在线上优化时使用,以快速得到给定设计参数及设计目标下最优的优化参数,提高了基片集成波导设计效率。

本发明涉及一种基于DQN深度强化学习算法的单一水库智能防洪调度方法,包括:构建基于人工智能的水库调度“无监督深度学习”模型、以水库发电调度为基础建立DRL的奖励反馈,以及基于水库实测入库径流过程建立针对某水库的调度人工智能专家。与动态规划求解的最优发电调度过程进行对比,本发明所述基于DQN深度强化学习算法的单一水库智能防洪调度方法的发电调度结果,明显优于传统的基于决策树的水库发电调度结果,说明本发明所述水库调度“无监督深度学习”模型具有很强大的学习能力和决策能力,在水库调度决策中具有很强的适应能力。
 882
0
882
0
为了解决急需一种低成本、快速的表面改性技术来实现金属表面超润滑(简称超滑)的问题,本发明提供了一种面向超润滑背景的电化学熔盐渗硼装置及其方法,包括电炉和安装在电炉旁的升降架,电炉内腔放置有外石墨坩埚,在外石墨坩埚内放置有内石墨坩埚,升降架上有夹持盘,夹持盘上安装有阳极石墨电极、试样挂载梁和氩气输送管,试样挂载梁与电源的负极连接,电炉上还设置有测温热电偶和排烟抽气管。本发明装置具有渗硼速率快,低成本等优点,电化学渗硼15min便可以获得30‑100μm厚的渗硼层,并且渗硼层致密度高,品质良好。本发明中经过渗硼处理后的样品在商用醇类润滑剂作用下可获得低于0.01的摩擦系数,具有优异的超润滑特性。
 1032
0
1032
0
本发明提供了一种化学气相淀积装置,包括反应器及多个进气管,所述进气管的进气端位于所述反应器外并连接一供气设备,出气端位于所述反应器内且能够伸长或缩短,至少两个所述进气管的出气端在竖直方向上位于所述反应器的不同位置处。通过调整所述进气管的出气端在所述反应器内的位置以调整所述反应器内的反应气体的分布,降低反应器内各处的反应气体浓度差,从而使同一批次的晶圆上淀积的薄膜一致性更好。基于此,本发明还提供了一种所述化学气相淀积装置的调节方法,根据测试晶圆所处的位置及淀积的薄膜厚度绘制关系模型,并通过关系模型获取反应器内各处反应气体的浓度,然后精细化地调整进气管出气端的位置以降低反应气体的浓度差。
北方有色为您提供最新的有色金属化学分析技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!






































































