全部
▼
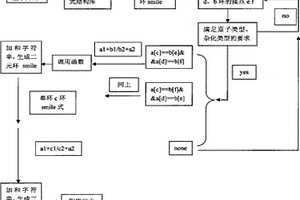
本发明涉及一种新型的基于SMILE化学表达式生成含能化合物分子组合库的方法,该方法根据单环化合物分子结构信息生成一系列二环、三环及多环化合物分子,并可在活性位点进行取代基取代。该方法中,单环分子及取代基基团均用基于SMILE的表达式进行描述。经验证:该方法具有良好的生成含能化合物分子组合库的效果。通过使用C++语言开发该方法的应用程序,可以快速、准确地生成相应的多环化合物分子,在含能化合物分子高通量筛选中具有良好的应用前景,尤其适用于先期预测尚未合成的含能化合物的爆轰性能,辅助研究人员选择爆轰性能较好的化合物进行合成及相关测试,从而大大减少人力、物力的浪费,提高含能材料分子研发的效率。

 1139
1139
 0
0
本发明涉及用于进行CVD风险评估的生物化学标志物,以及用于对包含新表位的肽片段进行定量的生物测定方法,所述新表位通过以蛋白酶切割动脉粥样硬化斑块的蛋白质例如光亮蛋白聚糖、多功能蛋白聚糖、基底膜蛋白聚糖、核心蛋白聚糖、双糖链蛋白聚糖、III型胶原蛋白、CRP、ApoE或弹性蛋白而形成,所述方法包括将样品例如尿或血清与对所述新表位具有反应性的抗体相接触,以及测定所述免疫结合配偶体与所述样品中肽片段的结合水平。所述测定可预测心血管疾病事件的风险。
 1021
0
1021
0
本发明公开一种复杂断块油藏精细注水与化学复合驱结合的采油方法,依次包括如下步骤:S1、根据化学驱的适用条件,选择最优的应用区块;S2、根据油水井情况,完善井网;S3、聚驱层系的优化;S4、选择综合对比优化后的化学驱溶液注入时机(含水率小于90%),注入量为油藏孔隙体积的0.6‑0.8倍(0.6‑0.8PV),提高综合开采效果;S5、实施过程中定期监测聚合物和表面活性剂溶液的产出浓度。本发明针对复杂断油藏开发特点,通过分层注水提高水驱波及效率,在开采中后期采用化学复合驱的方法提高原油采收率。
 1163
0
1163
0
本发明公开了一种基于深度强化学习的工业机器人位姿精度在线补偿方法,包括以下步骤:在不同运行状态下操作机器人,获取机器人的实际位姿,将所述实际位姿与理论位姿做误差运算,作为训练集;构建深度强化学习网络模型,确定所述学习网络的输入输出层;完成所述深度强化学习网络模型的预训练,训练得到网络模型参数;利用训练好的所述深度强化学习网络模型,在线预测机器人的位姿偏差,实现闭环的实时误差补偿返回,对非系统误差进行在线补偿。该方法通过使用两个功能不同的网络共同实现机器人模型与当前环境的交互学习,动态地调整控制参数,解决了工业机器人的非系统误差位姿补偿问题。
 852
0
852
0
本发明公开了一种用于压力蒸汽灭菌的化学指示油墨及其制备方法,属于UV光固化压力蒸汽灭菌技术领域。针对现有的重金属盐类油墨或者有机溶剂类油墨造成的器械污染导致病人感染、高浓度的VOCs排放的问题,本发明提供了一种用于压力蒸汽灭菌的化学指示油墨,包括以下质量百分比的组分:连接料50‑70%、有机染料0.1‑1%、催化剂10‑30%、催化剂载体1‑5%、稳定剂0.5‑1.5%、流平剂0.3‑0.6%、溶剂3‑30%;所述有机染料为偶氮类染料,溶剂为正丙醇、异丙醇或乙醇。本发明的化学指示油墨具有低VOCs排放的优点,可以广泛应用于指示卡、指示标签、化学PCD、B‑D测试物等产品的印刷。
 1026
0
1026
0
本发明实施例公开一种基于强化学习的目标追踪的训练方法、追踪方法。本发明实施例的基于强化学习的目标追踪训练方法,在传统ppo算法的策略网络损失函数上增加正则项对状态价值函数估计器网络和策略网络进行训练,强化学习的训练过程分为两个阶段,在第一阶段训练强化学习前期的策略,在第二阶段只采集设置好的阈值距离之内的数据进行训练,使近距离下的控制更加精确。本发明利用强化学习的方法不需要显式的预测未来时刻目标的加速度,只要知道了高速目标历史时刻的加速度状态,利用仿真环境中大量数据的训练以及正确的训练方法,可训练出一个合理的追击策略。解决了目标追踪的模型给出的加速度波动过大以及最终的训练精度不够的问题。
 832
0
832
0
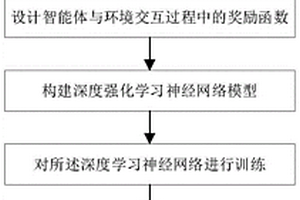
本发明公开基于深度强化学习的配电网保护控制方法及系统,包括智能体获取本地量测数据,将获取到的感知信息作为深度强化学习的环境状态信息;智能体获取动作类型和参数作为深度强化学习的动作空间信息;设计智能体与环境交互过程中的奖励函数;构建深度强化学习神经网络模型;对所述深度学习神经网络进行训练;根据训练好的深度强化学习神经网络模型对获取到的感知信息进行自主决策,得到控制断路器动作的指令。本发明改变了传统电流保护以电流整定值为动作判定依据的思路,让保护装置自主感知配电网的运行状态,通过不断的试错学习,自适应调整保护动作策略,以满足高度不确定性配电网环境的保护动作的选择性和速动性。
 816
0
816
0
本实用新型公开了一种用于化学机械研磨的固定环,适于固定一晶片,所述固定环包括:一环形本体,其内部开设有一环形通道;至少一个第一孔,分布在环形本体的外壁上,且与环形通道连通;多个第二孔,均匀分布在环形本体的内壁上,且与环形通道连通,当化学机械研磨工艺被中断时,通过由固定环内壁孔中喷射出的保护液清洗金属表面的研磨液,可防止金属被腐蚀,减少在后续工艺中金属表面产生擦痕,并且延长机器检修时间。
 1002
0
1002
0
本发明涉及一种用于研磨半导体晶圆基材的化学机械研磨装置及研磨方法,该装置适用于研磨一晶圆上的一材料层,其包括一底座、数个研磨头、数个研磨垫、一度量器以及一控制器。该研磨头是设置于该底座之上;该研磨垫是设置于该底座之上;该度量器是设置于该底座之上,并且是位于该研磨垫中的两个相邻研磨垫之间,用以量测该材料层的厚度。该控制器是连接于该研磨垫以及该度量器;该研磨方法是在该研磨垫中的至少一个第一个研磨垫上研磨该材料层;以该度量器量测该材料层的厚度;以及在该研磨垫中的至少一个第二个研磨垫上将该材料层研磨成一目标厚度。本发明可以较大幅度的节省研磨的时间,提高生产效率。
 818
0
818
0
本发明公开了一种基于沉积物地球化学特征识别大洋中脊热液区的方法,本发明通过对沉积物样品进行处理,获取其地球化学组成数据,并计算不同端元组成的沉积物对化学组成的贡献,获得热液来源元素的含量,估计热液来源元素的扩散距离,最后预测调查区热液活动的数量和可能产出的位置。本发明的优点是在大洋中脊热液活动探测中,可以实现活动和非活动热液区的识别,以更准确、方便的确定热液区的位置,具有便捷、高效的特点。
 823
0
823
0
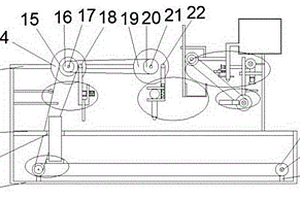
本发明公开了一种新型化学试验机,包括箱体,所述箱体上端面上固定安装有第一支杆,所述第一支杆上设置有PH测试装置,所述第一支杆上设置有位于所述PH测试装置右侧的取液装置,所述取液装置右侧设置有清洗装置,所述箱体上固定安装有滑道,所述箱体下端壁上固定安装有第二支杆,所述第二支杆上端转动安装有第一转轴,所述第一转轴上固定安装有第一带轮,第二带轮,所述箱体下端壁上固定安装有位于所述第二支杆右侧的第三支杆,所述第三支杆上端固定安装有第一电机,所述第一电机输出轴上固定安装有第三带轮,本次发明的新型化学试验机将部分化学仪器结合起来,使得实验更加的自动化和提升效率。
 947
0
947
0
本发明属于环境监测及电化学传感器领域,更具体地,涉及一种球磨石墨烯修饰的电化学传感器、其制备和应用。其充分结合球磨石墨烯修饰的电化学传感器的应用需求和特点,对该传感器的石墨烯修饰探头材料的制备方法进行重新设计,通过精确控制其湿法球磨工艺以及分离过程,获得具有特定尺寸和边缘缺陷结构的石墨烯,用于构建电化学传感器电极表面的石墨烯修饰膜,制成电化学传感器具有较高的灵敏度和准确性。
 1042
0
1042
0
本发明公开了一种新型光子晶体光纤化学传感器。本发明的光纤包括包层和纤芯,其特征在于:该光子晶体光纤化学传感器的纤芯左右两侧沿x轴各有4个相同的椭圆空气孔,且椭圆空气孔的长轴与x轴平行,x轴上方有三个由不同形状及大小的空气孔组成的三角形结构,其中,左上方三角形结构由6层椭圆形空气孔构成,正上方倒三角形结构由5层大圆形空气孔构成,右上方三角形结构由6层小圆形空气孔构成,光纤的整体结构呈对角对称分布。应用本发明的光子晶体光纤化学传感器可实现高灵敏度的化学传感,该光纤结构在监测水、乙醇或苯的化学传感装置中具有较大的参考价值。
 1126
0
1126
0
本发明公开一种可拆的电化学传感器,包括基板,还包括收紧套,基板上固定设有刻蚀层,刻蚀层上固定连接有间隔设置的三个安装槽,每个安装槽内均设有连接片、电极体,刻蚀层上设有压紧层,压紧层上设有滴定孔,三个电极体的前侧均裸露在滴定孔内;收紧套具有下底面,下底面的左侧上方和右侧上方均设有回包部,回包部与下底面通过左侧壁、右侧壁连接在一起,基板、刻蚀层、压紧层均设在下底面与回包部之间。通过更换不同的电极体,可以使得本发明适用于不同的化学物质的测定,而基板、压紧层、收紧套可以共用,这样就大大地减少了电化学传感器携带量,同时也降低了维护维修成本。本发明用于电化学传感器。
 873
0
873
0
本发明公开了一种可实时调控加热温度的化学浴池。该装置包括:内壁,外壁,加热组件,用于为浴池内的化学溶液加热;实时控温系统,实时监测和控制化学浴池内溶液温度,当溶液温度低于预设温度时,系统启动加热组件,进行加热,直至达到所需温度;搅拌组件,用于对两种或以上不同的溶液进行混合搅拌;保温层,用于化学溶液的保温;排水管,用于排放废液;盖板,防止内部溶液蒸发和热量损失,万向轮,用于移动整个浴池;拉手,用于拖拉化学浴池。本发明解决了相关技术中大型化学浴池内溶液加热不均匀,大型部件反应不完全的技术问题。
 1145
0
1145
0
治疗粉刺的化学酊剂及其制备方法,其特征是主要是由下列重量份的原料制成:氯霉素5-30份、合成龙脑10-30份、水杨酸5-30份。具体制备为取氯霉素、合成龙脑、水杨酸加入75%乙醇中搅拌使其溶解;调整pH值为3.0-5.0,含醇量为65-75%;静置、滤过、灌装、检验、包装即得。本发明酊剂对于治疗粉刺起效迅速、疗效确切,对皮肤的刺激作用小,皮肤脱皮程度极为轻微,无明显毒副作用。制剂工艺可以保证各成分在生产过程中的化学稳定性。
 958
0
958
0
本发明公开了一种用于提高绿藻产油的化学诱导剂的筛选方法及其应用。该方法包括如下步骤:S1、将活化的绿藻细胞接种至无氮含糖培养基中并分成n份,然后分别加入浓度梯度的化学诱导剂进行诱导培养,依次得到诱导剂组绿藻细胞,同时以不加入化学诱导剂为对照,得到对照组绿藻细胞;S2、采用流式细胞仪分别测定诱导剂组绿藻细胞和对照组绿藻细胞内叶绿素的平均荧光强度;S3、根据诱导剂组和对照组绿藻细胞内叶绿素的平均荧光强度判断该化学诱导剂是否能提高绿藻细胞内产油量,并以此筛选出最佳诱导浓度。本发明方法可以筛选出能有效提高绿藻产油量的化学诱导剂,进而可将其用于培养绿藻细胞生产生物柴油原料油和/或食用型藻油。
 1164
0
1164
0
本发明公开了一种塑料表面化学镀铜的方法,包括预处理和化学镀铜各单元过程,所述预处理是将塑料置于预处理液Ⅰ中,40-60℃下超声处理10-20分钟,然后再置于预处理液Ⅱ中,50-80℃下超声处理30-50分钟,处理完成后洗涤并干燥得到预处理塑料,随后采用化学镀方法在预处理塑料表面获得金属铜层。本发明不需要敏化和活化预处理,通过常温超声波辅助进行塑料表面化学沉积金属铜的工艺,操作简便,降低污染,节约资源。本发明所制备的塑料表面金属铜层,涂层致密性良好,组织成分均匀;划痕法测得平均临界载荷值为50-60N,膜基结合良好。
 1148
0
1148
0
本发明公开了一种小分子化学趋向行为的微流控光学观察系统及观察方法。所述的微流控光学观察系统包括光学平台和微流控芯片,以光致化学发光物质为研究对象,通过在低雷诺数流体中构建受体‑配体对的仿真化学梯度场,利用光致化学发光物质的发光特性进行图像采集,观测不同尺度分子和其有序集合的自发定向迁移性能,将受体的运动相态参数与配体的可逆缔合反应信息相关联,结合数理统计,观察分子结合诱导趋化现象。
 973
0
973
0
本发明公开一种光电化学降解罗丹明B的方法,该方法采用的是光电化学反应,其中的阳极金属片采用高熵合金片,该高熵合金片成份表述为AlxEyFezNiuGv,经真空电弧熔炼制备而成,元素的原子百分比相加和为100%,其中铝元素、铁元素、镍元素的原子百分比x、z、u分别为10%~45%;所述阴极金属片采用铂片或铂网;所述光电化学反应的光源照度控制在垂直照度500lux~1000lux,测量高度为距表层溶液50cm处;所述光照时间与电化学作用同时进行。本发明方法克服了现有技术存在的电极损耗率高且铁泥产量大的问题。


本发明提供一种基于Muti‑Agent与强化学习的机场融合仿真方法,包括以下步骤:构建道路Agent、交叉口Agent、模拟信号灯Agent、车辆Agent和航空器Agent;对所述道路Agent、所述交叉口Agent、所述模拟信号灯Agent、所述车辆Agent、所述航空器Agent与环境的交互进行强化学习,以实现机场融合仿真。本发明的基于Muti‑Agent与强化学习的机场融合仿真方法基于多Agent和强化学习实现机场交通的实时融合仿真,有效提升了机场运行中的跑道监控、路由规划及冲突探测与解脱。

 853
0
853
0
本发明提供一种经酸水解研究蓝莓果化学组分的方法,属蓝莓果化学成分研究技术,包括下述步骤:1)制备蓝莓果化学组分提取液,2)提取物水解,3)水解物衍生化,4)气质联用仪测试衍生化溶液,5)获得蓝莓果化合物组分信息。本发明将蓝莓果提取物水解后采用气质联用仪柱前衍生化法研究其组分,为全面细致地研究蓝莓果化学组分提供了工艺参数,为合理利用生物量丰富的蓝莓资源提供指导。
 1017
0
1017
0
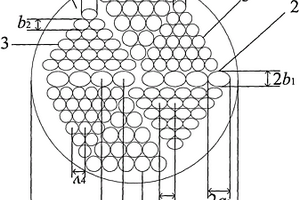
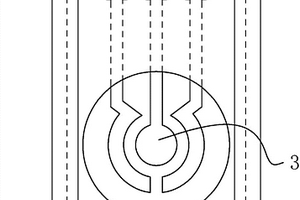
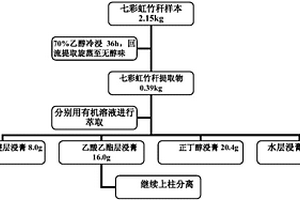
一种从七彩竹秆中提取分离黄酮类化合物的方法,利用回流提取法从七彩虹竹秆原料中进行总成分提取,并利用硅胶柱色谱分离,分离出晶体化合物,再经TLC薄层鉴别和光谱解析,得到该植物所含的6种化合物,并进一步进行含量测定。本发明对黄酮类化合物的组织化学定位进行更全面的了解竹类植物中类黄酮化合物的合成分布提供了有效方法。首先利用徒手切片技术对竹类植物的茎中的黄酮类化合物进行组织化学定位。通过该发明,了解竹类植物茎中类黄酮化合物的分布情况,从而为各类物质代谢过程的研究提供基础。其次从蒲竹子茎中提取化学成分,利用硅胶柱色谱分离,分离出晶体化合物,再经TLC薄层鉴别和光谱解析,得到该植物所含的化合物;并利用高效液相色谱法得到七彩虹竹3个时期中化学成分图谱,精确确定各个时期中黄酮类化合物的含量和种类。
 868
0
868
0
本发明提供一种双工作电极电化学微通道流通池,该流通池包括两个工作电极、一个参比电极、一个对电极和一个流经电极的微通道,两个工作电极分别放置在微通道同侧的上游和下游,对电极放置在微通道另一侧。使用过程中,含有反应物的电解质溶液从微通道上游流入,分别在两个电极发生电化学反应,随后流入含有参比电极溶液的收集室。该流通池可在电化学工作站的配合下测量电化学反应速率、反应选择性等关键参数。
 989
0
989
0
一种基于层次化和模块化学习的导航避障方法,包括:实时构建室内场景地图;基于移动机器人获取的视觉图像、实时构建的场景地图、导航目标图像,设计长期导航目标点生成模型,确定导航目标图像在实时构建的场景地图上的位置;确定基于深度强化学习框架的移动机器人导航避障模型,发布移动机器人导航到预测的长期目标点的速度指令;设计导航结束预测模型,在一定时间间隔后,判断导航是否结束,如果预测的导航并未结束,则重新以上导航目标点生成及导航决策的过程,直到导航结束。本申请解决了现有技术中在没有预设环境地图的情况下,难以安全绕过障碍物并高效导航到指定目标的问题,提高了移动机器人导航技术对复杂多变环境的适应性。
 863
0
863
0
本发明公开了一种基于深度强化学习的移动设备全景视频播放系统,利用全景视频分块传输、动态码率选择、运动预测三项技术,在保证视频质量,节省网络带宽的同时,给用户提供能在无线移动设备上播放全景视频的体验。将全景视频信息分成多块具有多种清晰度的全景视频块,在动态码率选择中采用深度强化学习的方法根据运动预测自动选择码率、自动预测头部运动的效果,根据用户视角变化选择全景视频清晰度,最终在视频播放模块中显示出清晰度不同的流畅全景视频,为用户带来更好的体验。
 826
0
826
0
本发明提供一种基于强化学习的导弹制导方法和装置,其中方法包括:基于雷达信号,获取当前导弹和目标的位置、姿态信息,以及导弹当前剩余能量信息;基于当前导弹和目标的位置、姿态信息,以及导弹当前剩余能量信息,确定当前时刻的观测向量,并基于当前时刻以及上一时刻的观测向量,确定当前状态;将所述当前状态输入至动作网络,得到所述动作网络输出的动作,并基于所述动作,确定所述导弹的控制量;其中,所述动作网络是基于样本观测向量、每一时刻导弹采取的样本动作及其对应的奖励进行强化学习得到的。本发明提高了带角度约束的导弹围捕准确性。
 787
0
787
0
本发明涉及一种多智能体强化学习训练方法及系统,其方法包括:局部策略训练阶段,智能体局部策略利用自身的局部观测信息做出动作;全局策略训练阶段,智能体的全局策略利用局部策略作为与环境交互的动作模块,全局策略以环境全局状态作为输入,给出对全局信息在隐空间中进行编码,同时利用全部智能体的局部观测信息使用神经网络对全局状态进行拟合;局部策略结合各自的局部观测信息以及全局策略的输出在环境中做出符合环境要求的合适动作;局部策略优化阶段,利用前两个阶段得到的全局策略与局部策略以及拟合模型,在现有的局部策略的基础上进行优化,最终得到效果更好的智能体。本发明能提升多智能体强化学习训练的速度和准确性。
北方有色为您提供最新的有色金属化学分析技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!






































































